Zoom #1
les USV : faisons le point
SUBTOP : Explorer, mesurer et comprendre les environnements complexes
Le rendez-vous éditorial de Subtop dédié aux grandes évolutions des investigations subaquatiques et terrestres
Choisir le bon cap
Depuis plusieurs mois, nous échangeons autour de projets USV.
Levés bathymétriques, géophysique, courantométrie…,
sécurisation de zone par surveillance, optimisation de campagnes.
Aujourd’hui, le contexte a changé.
Les plateformes ont évolué.
Les configurations se sont enrichies.
Certaines unités sont disponibles immédiatement.
La question n’est plus « faut-il un USV » mais
« Quel USV et est-ce le bon moment
pour concrétiser votre projet ? »
Un échange technique de 20 minutes suffit souvent pour :
• Clarifier votre stratégie
• Identifier la configuration adaptée
• Déterminer le bon timing
Thomas Longchamp
Directeur Commercial et Marketing
06 50 80 69 77
thomas.longchamp@subtop.fr
POURQUOI ET QUAND intégrer un USV ?
Un drone devient pertinent lorsque :
Les zones sont peu profondes ou difficiles d’accès

La sécurité des équipes devient un enjeu

Les campagnes sont récurrentes

Les délais d’intervention doivent être réduits et le rendement optimisé

L’internalisation devient économiquement rationnelle
Dans ces contextes, l’USV n’est plus un outil complémentaire.
Il devient un levier d’optimisation opérationnelle.
Cas d’usages
Les USV ne répondent pas à un usage unique mais à des contextes opérationnels précis.
Voici les situations dans lesquelles leur intégration devient pertinente, d’un point de vue technique et décisionnel.
Surveillance d’envasement portuaire
Mesurer l’évolution des fonds portuaires pour décider du dragage et évaluer les coûts sur des données vérifiées
Contexte
Grands ports maritimes, ports de pêche et de plaisance, bassins secondaires, souilles, zones à faible tirant d’eau ou exiguë et difficile d’accès.
Problématiques
– Intervention récurrente pour assurer la sécurité de la navigation
– Accumulation progressive des sédiments
– Manque de visibilité entre 2 interventions
– Décision de dragage prise lorsque les problèmes sont déjà visibles et non sur la base d’un suivi anticipé
Suivi de chantier maritime
Sécuriser l’avancement des travaux grâce à un contrôle régulier et réactif.
Contexte
Chantiers de dragage, terrassement, pose d’enrochement, construction de digues, ou aménagement portuaire.
Problématiques
– Écart entre le projet théorique et la réalité terrain
– Sur-dragage non maîtrisé (perte économique) ou sous-dragage (non-conformité contractuelle)
– Absence de visibilité quotidienne sur l’avancement réel des volumes extraits
– Dépendance aux prestataires extérieurs
– Rendement non-optimisé
Inspection d’ouvrages portuaires
Caractériser précisément le pied d’ouvrage et l’évolution des fonds adjacents, analyse structurelle
Contexte
Quai, digues, appontements, rideaux de palplanches, structures béton ou enrochements
Problématiques
– Difficulté à acquérir des données fiables au contact des parois verticales
– Zones d’ombre acoustique à proximité immédiate des ouvrages
– Discontinuité des profils entre levés successifs
– Exposition des équipes et des supports nautiques lors des approches en embarcation classique
Mesures en rivières et plans d’eau intérieurs
Acquérir des données fiables dans des environnements à faible tirant d’eau et à géométrie contraignante
Contexte
Fleuves, rivières, canaux, retenues de barrage, lacs artificiels, chenaux secondaires
Problématiques
– Mise à l’eau et accès difficiles
– Tirant d’eau insuffisant pour une embarcation classique
– Présence d’obstacles (herbiers, embâcles, hauts-fonds)
– Variabilité rapide des profils en période de crue ou d’étiage
– Difficulté à mobiliser des moyens nautiques lourds pour des campagnes ponctuelles
Campagnes offshore et grandes étendues
Développer la capacité d’acquisition en environnement exposé sur de grandes surfaces.
Contexte
Zones offshores pour le oïl & gaz, les énergies renouvelables, l’océanographie. Surveillance d’infrastructures marines, levers géophysiques, levers de paramètres physico-chimiques.
Problématiques
– Mobilisation coûteuse d’un navire déployé 7/7 24/24
– Exposition des équipages aux conditions météo dégradées
– Nécessité de plateformes multi capteurs
– Rendement non optimisé
Un besoin = une plateforme
Chaque environnement d’intervention implique un niveau d’exigence différent en termes de stabilité, intégration capteurs et capacité d’emport. Voici comment nos plateformes se positionnent selon les usages.
Drones compacts
|
 Apache 3 Pro |
 Apache 4 Lite |
 Apache 4 Pro |
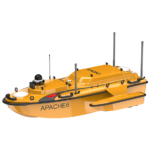 Apache 6 |
|---|---|---|---|---|
|
Description |
Plateforme ultra compacte |
Plateforme ultra compacte dédiée aux jaugeages |
Plateforme compacte polyvalente multicapteurs |
Plateforme à capacité d’emport accrue |
|
Environnement cible |
→ Ports |
→ Fleuves |
→ Ports |
→ Ports |
|
Stabilité en conditions dégradées |
||||
|
Dimensions |
1,05 m x 0,55 m x 0,39 m |
1 m x 0,57 m x 0,27 m |
1,2 m x 0,75 m x 0,4 m |
1,8 m x 0,5 m x 0,25 m |
|
Tirant d’eau max |
13 cm |
12 cm |
9 cm |
15 cm |
|
Vitesse max |
6 m/s |
6 m/s |
6,5 m/s |
5 m/s |
|
Robustesse |
IP67 |
IP67 |
IP67 |
IP65 |
|
Capteurs |
|
|
|
|
|
Système GNSS |
INS GNSS RTK double antenne |
INS GNSS RTK double antenne |
INS GNSS RTK double antenne |
INS GNSS RTK double antenne |
|
Autonomie |
2 x 3h à 2 m/s |
2 x 3h à 2 m/s |
2 x 4,5h à 2 m/s |
2 x 3h à 2 m/s |
|
Télécommande |
||||
|
Applicatif Android pour navigation, acquisition et traitement |
||||
|
Mat télémétrique |
||||
|
Communication USV / Télécommande |
Radio 1 km et GSM |
Radio 1 km et GSM |
Radio 1 km et GSM |
Radio 1 km et GSM |
|
Feux de navigation |
||||
|
Modem de communication RTK |
UHF et GSM |
UHF et GSM |
UHF et GSM |
UHF et GSM |
|
Caméra 360° |
||||
|
Radar d’évitement d’obstacle 120° |
||||
|
Construction |
Carbone / Epoxy |
Carbone |
Carbone |
Carbone |
|
Motorisation électrique carennée |
Oui |
Oui |
Oui |
Oui avec tuyère orientable |
|
Support d’antennes flexibles |
||||
|
Nombre de batteries fournies en standard |
4 |
4 |
4 |
4 |
Drones polyvalents & offshore
|
 Otter Pro |
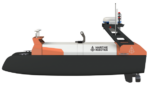 Otter X |
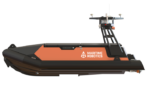 Mariner |
 Mariner X |
|---|---|---|---|---|
|
Description |
Plateforme polyvalente pour zone protégée |
Plateforme polyvalente en mer ouverte, côtier, estuaires, fleuves, canaux |
|
|
|
Environnement cible |
→ Ports |
→ Mer ouverte, côtier |
→ Mer ouverte, côtier, offshore |
→ Mer ouverte |
|
Etat de mer |
2 – 3 |
4 |
> 8 |
> 8 |
|
Stabilité en conditions dégradées |
||||
|
Dimensions |
2,0 m x 1,08 m x 1,06 m |
4,50 m x 2,25 m x 1,90 m |
5,98 m x 2,06 m x 2,70 m |
9,0 m x 2,50 m x 3,0 m |
|
Tirant d’eau |
30 cm |
50 cm |
80 cm |
1 m |
|
Vitesse max |
6 nds |
10 nds |
20 nds |
12 nds |
|
Capteurs |
Agnostique et multicapteurs |
Agnostique et multicapteurs |
Agnostique et multicapteurs |
Agnostique et multicapteurs |
|
Vitesse max |
6 nds |
10 nds |
20 nds |
12 nds |
|
Système GNSS |
INS GNSS RTK |
INS GNSS RTK |
INS GNSS RTK |
INS GNSS RTK |
|
Système de contrôle VCS sous Linux |
||||
|
Logiciel de navigation, acquisition et traitement |
||||
|
Mat télémétrique |
||||
|
Communication USV / Télécommande |
Radio 2 km et GSM |
Radio 2 km et GSM |
Radio 2 km et GSM |
Radio 2 km et GSM |
|
Feux de navigation |
||||
|
Modem de communication RTK |
UHF et GSM |
UHF et GSM |
UHF et GSM |
UHF et GSM |
|
Caméra 120° |
||||
|
Système d’évitement d’obstacle 360° Seasight (Vidéo et lidar) |
Oui |
Oui |
Oui |
Oui |
|
Radar |
||||
|
Construction |
PEHD |
PEHD |
PEHD |
PEHD |
|
Motorisation |
100% électrique |
100% électrique |
Electrique et diesel |
Electrique et diesel |
|
Autonomie |
20 h à 2 m/s |
24 h à 2 m/s |
8 h en électrique |
8 h en électrique |
|
Nombre de batteries fournies en standard |
4 |
de 3 à 6 |
– |
– |
Opportunités immédiates
Apache 4
Certaines plateformes et configurations sont actuellement disponibles sans délai de production, permettant un démarrage rapide de vos projets ou une montée en capacité immédiate.
Discutons de votre configuration idéale
Chaque environnement présente ses contraintes propres :
tirant d’eau, stabilité, fréquence de mission, intégration capteurs, précision attendue.
Au-delà du choix de la plateforme, l’enjeu est de définir une configuration cohérente et adaptée à vos objectifs opérationnels.
Échangeons pour définir ensemble la configuration réellement adaptée à votre environnement

Thomas Longchamp
Directeur Commercial
et Marketing
06 50 80 69 77

Marc Le Floch
Ingénieur des Ventes
Région Ouest
06 50 81 11 30

Thalia Guéroult
Ingénieur des Ventes
Région Sud
06 31 24 30 81
Toute une équipe à votre service
conseil
technique
installation
intégration
FORMATION
SUR SITE
SUPPORT TECHNIQUE
SERVICE
APRèS-VENTE
Siège social
ZA Les Belles Vues
3, rue des Prés
91290 ARPAJON
Bureau Ouest
PA La Guerche
27 avenue des Frères Lumières
44250 Saint Brevin